2025 年 7 月 22 日,由盖世汽车主办的第八届智能辅助驾驶大会在上海圆满落幕。这场聚焦行业前沿的技术盛宴以 “AI 赋能、安全领航” 为核心主题,汇聚了车企、科技巨头、核心零部件供应商及科研机构的顶尖力量,共同解码智能驾驶技术突破与商业化落地的关键路径。

在 AI 技术重构产业生态、安全性能成为智能驾驶核心竞争力的当下,智能辅助驾驶正迎来技术突破与商业化落地的双重爆发期。当 AI 算法深度渗透感知层的环境识别、决策层的路径规划,安全体系作为技术落地的核心保障,二者形成合力,推动汽车产业加速向智能化、网联化新纪元迈进。本届大会的召开,正是对这一产业趋势的精准回应,为行业搭建了技术碰撞与资源对接的高效平台。


作为高精度组合定位感知技术领域的创新者,武汉际上导航总经理孙红星博士受邀出席大会感知融合专场,发表题为 《高精度组合定位感知技术在智能辅助驾驶中的应用》的主题演讲,系统分享了多源异构信息融合技术在解决智能驾驶定位痛点中的实践成果。


深耕高精度组合定位感知技术领域多年,际上导航始终以 “自主可控技术” 为核心驱动力,构建了覆盖 GNSS、INS、LiDAR、相机、里程计的多源异构信息弹性深度融合技术体系。核心优势如下:
全栈自研的技术闭环:从硬件模组(IMU、GNSS 接收端)到算法软件(GnssExplorer、Shuttle)全链条自主研发,攻克 GNSS/INS 紧组合、多源融合完好性等核心算法,满足自动驾驶对定位 “高精度、高可靠、高可用” 的严苛要求。
弹性融合的技术突破:创新研发的多源异构信息弹性深耦合技术,有效解决传统定位系统 “融合深度不足、环境适应性弱、对高精地图依赖度高” 等行业痛点,已具备智能驾驶预期功能安全定位算法的量产交付能力。
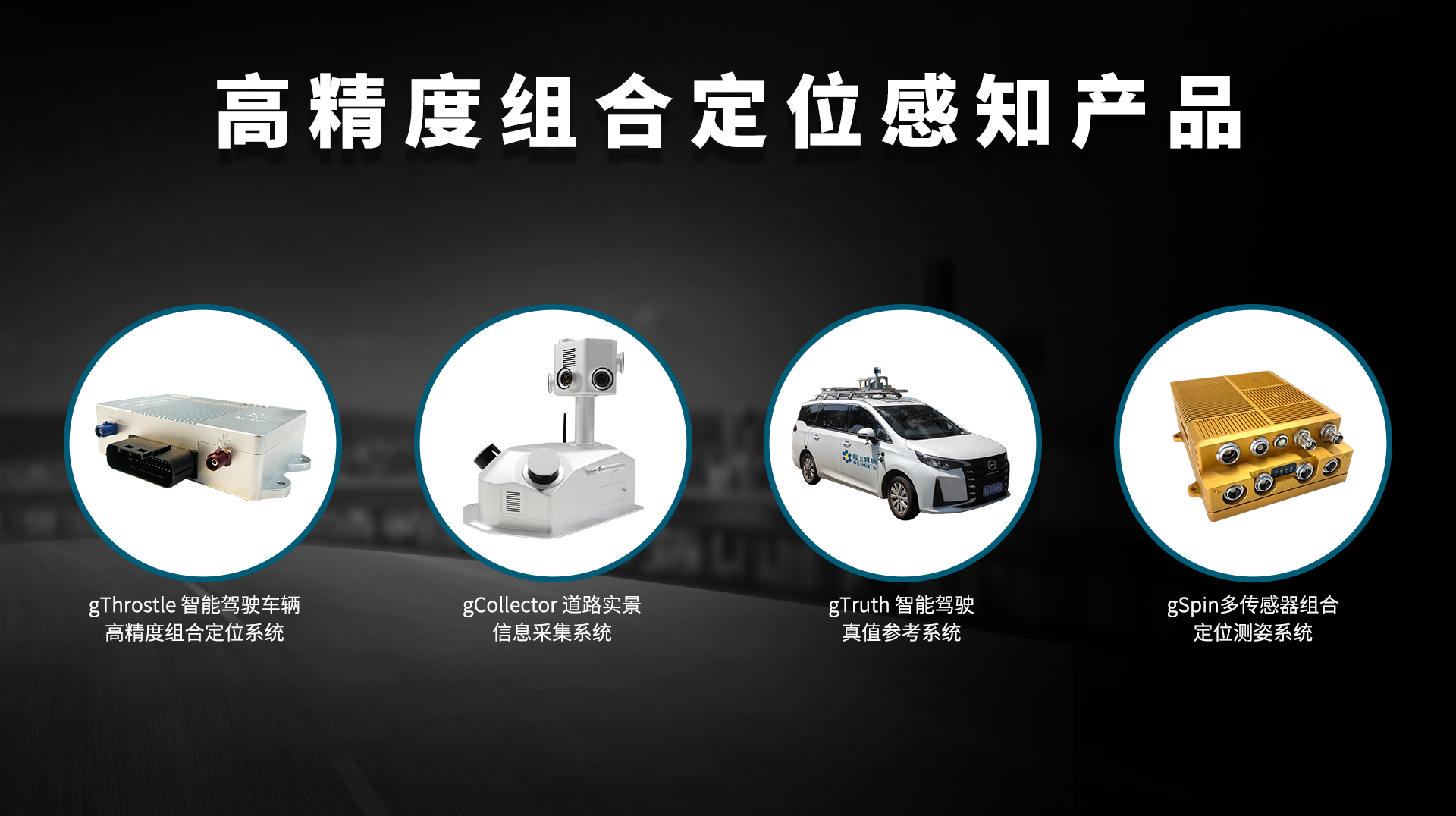
场景化的产品矩阵:
gThrostle 智能驾驶车辆高精度组合定位系统凭借双频 / 三频多星座 GNSS+RTK/PPP-RTK 技术,在隧道、地下停车场等弱卫星信号场景下仍能输出厘米级定位精度,适配 HWP、TJA、AVP 等主流智能驾驶功能;
gCollector 道路实景信息采集系统集成激光雷达与全景相机,依托SLAM 算法实现无控制点环境下的厘米级数据采集,为 BEV 模型训练提供高精度场景数据;
gTruth 智能驾驶真值参考系统则通过多传感器融合技术构建 “黄金标准”,为感知算法迭代提供精准测评依据;
gSpin 多传感器组合定位测姿系统由 GNSS、INS、IMU、里程计及高可靠数据采集系统组成,通过 GNSS/INS 组合差分定位定向提供运动载体的瞬时位置、速度和姿态信息,在城市峡谷、隧道等恶劣 GNSS 环境中仍能有效工作。

凭借过硬的技术实力,际上导航已与长安汽车、吉利、百度、三一机载、港迪技术等头部企业达成深度合作,其高精度组合定位系统在多款量产车型及智能驾驶测试项目中实现稳定应用。未来,公司将持续以算法创新为核心,推动高精度定位技术与智能驾驶场景的深度融合,为产业提供更可靠的时空感知解决方案。