智能作业机器人:
在开阔场景里,作业机器人使用GNSS/IMU的传统定位技术,即可达到厘米级定位,但在坡地、林地、峡谷等复杂场景,或受限于GNSS信号遮挡等,传统方案无法为作业机器人提供精准的定位及感知信息。
际上导航自主研发了高精度组合惯导,将测绘领域积累30多年的GNSS、INS、LiDAR、相机、里程计等多源异构弹性深耦合技术,为各种无人装载机、门机、整平机、割草机等作业机器人实现厘米级精准定位与障碍物感知。

自动装卸设备:
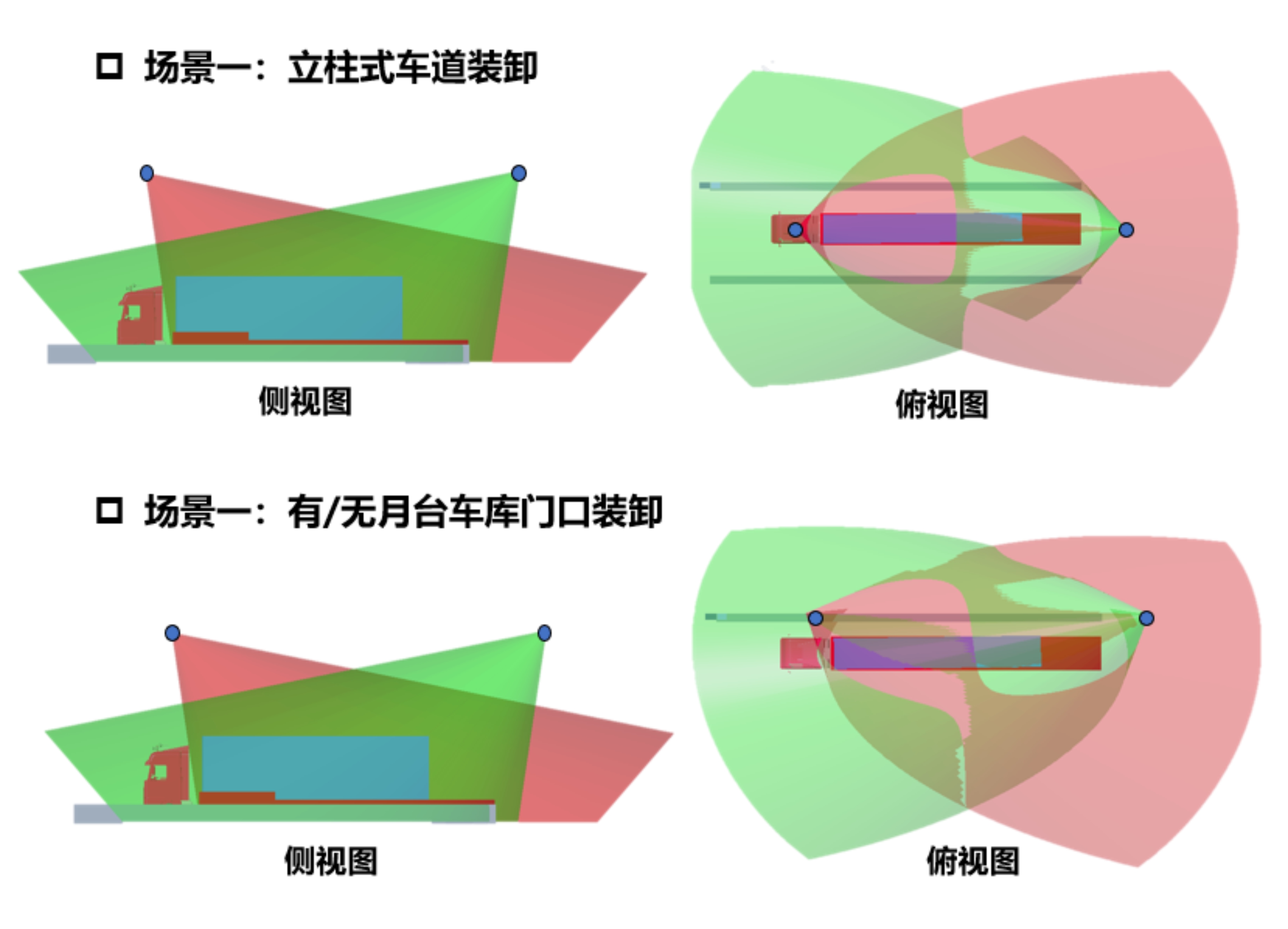
制造业升级大势所趋,在仓储物流过程中,不同标准尺寸重量的箱体存在自动化作业的需求。目前,疲劳作业、环境适应能力差、车辆停放状态检查和箱体间隙识别等,一直是作业过程中的痛点。
针对本场景的需求痛点,际上导航自主研发了行业整体技术方案,有针对性地提出完整的设备部署方案,通过融合激光雷达、SLAM 定位、智能控制等技术,实现物料装载、运输、卸料全流程自动化,助力企业降低成本、提升生产效率、保障作业安全,推动工业场景真正向智能化、无人化转型。
港口智慧管理:
在港口码头装卸作业过程中,存在堆场库存经常变动、堆场垛位经常变化、传统跑垛效率低、堆场垛位利用率不高、作业区域监控不直观等问题,导致工作效率低下。
针对本场景的需求痛点,际上导航通过RTK定位+IMU(惯性导航)组合定位导航的方式,确定门机位置,有效提高堆卸效率;提供堆场库存测算方案,能够通过体积的绘制测算实现对各类散杂货垛位的库存量估算;利用无人机扫描数据和生产业务数据,对堆场、垛位总体情况进行智能分析,为管理者量身定制智能化、平台化的管理和决策支持平台,全面提升港口的堆场、垛位和货物监管规划能力。







