面向智能驾驶行业的面向智能驾驶行业的GNSS/INS/WS/Image/Lidar等多源异构信息弹性深组合定位系统
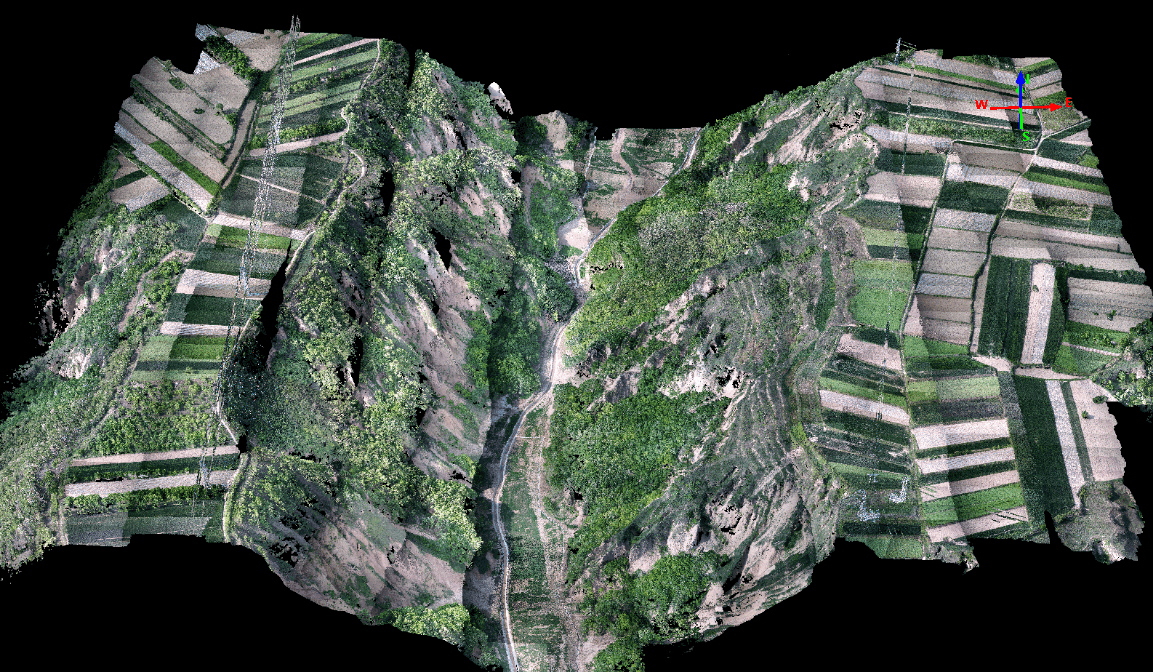
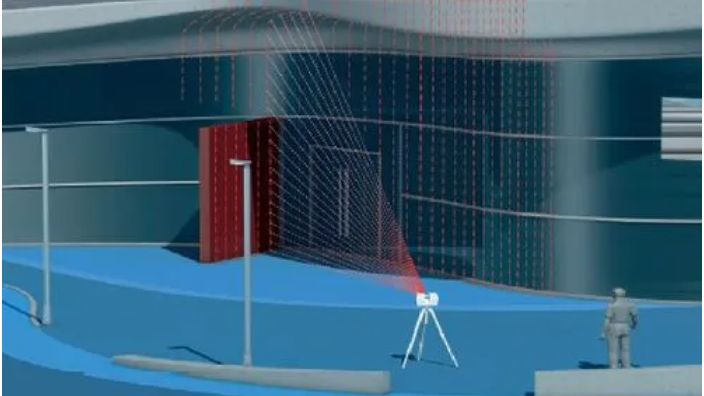
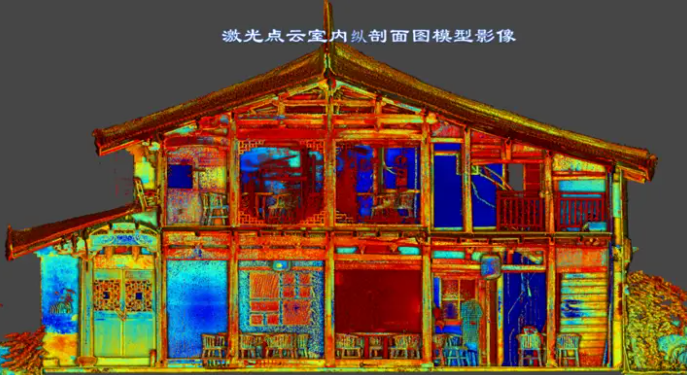
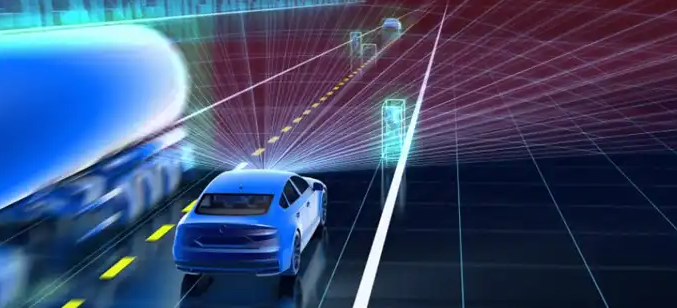
以GNSS(卫星定位)/INS(惯性导航)集成为代表的组合定位系统在多个行业中已经得到了广泛应用。根据不同的行业需求,组合定位系统也存在一些不同的具体技术方案。总体上,GNSS存在单点定位和差分定位的区别,差分定位中也存在使用伪距和载波相位观测量的差异。INS存在器件精度级别的不同,虽然导航算法基本相同,但导致了组合滤波器中误差模型的差异。对于陆地车辆定位,WS(里程计)几乎不可或缺,它将在GNSS受到遮挡失锁的时段有效延缓INS的误差积累,当然它需要在实时标定后才能参与组合工作。Image(影像)和Lidar(激光点云)的作用类似,一方面它们可以利用已知地图数据库特征点坐标进行空间交会,以求解车辆地理位置,起到锚点的作用;另一方面它们也可以使用影像和点云匹配方法,实现SLAM定位,也能在GNSS失锁时段延缓INS的误差积累。对这些技术融合的关键,是要在对这些技术理解的基础上,设计一个具有弹性的滤波器,这个滤波器能够弹性接入不同物理类型、不同数学原理、不同随机特性、不同时空特点的空间定位信息数据,输出高精度高可靠的运动载体时空状态信息。
智能驾驶行业的组合定位产品和应用
基于GNSS/INS/WS/Image/Lidar弹性深组合技术,际上导航推出了面向智能驾驶行业的系列组合定位产品。针对L3以上级别的无人驾驶车辆高精度定位,公司推出了低成本的组合定位盒子(PBox)gThrostle;针对车辆动态特性检测以及BEV应用,公司推出了高精度组合定位测姿系统gSpin,包括310、410、510、610四个型号,以应对不同的精度需求;以gSpin为基础,公司推出了无人驾驶AI训练真值车gCollector。
gThrostle针对目前市场上PBox产品普遍存在的组合深度不够,接入信息少,精度和可靠性不高、高度依赖高清地图、功能安全不足等缺点,在充分复用影像和激光雷达数据的基础上,提出了GNSS/INS/WS/Image/Lidar弹性深组合技术路线,摆脱了对高精地图的强依赖,系统在有高精地图情况下可以更优的运行,但即使没有也能够保证系统的精度、高可靠性、完好性。gThrostle产品如图1所示。




图1. gThrostle 产品外观 图2. gSpin 410/510/610系列产品
gSpin兼容中等精度MEMS IMU以及高精度光纤陀螺IMU,支持GNSS/INS/WS/Image/Lidar弹性接入,为各种运动载体提供高精度的地理参考和动态特性信息。gSpin系列产品如图2所示,配套后处理软件如图3所示。
gCollector集成了两路三维激光扫描仪、六路高清摄像机,以及gSpin POS系统,系统整体加装在车辆平台上进行视频影像和激光雷达扫描的BEV采集,具有测量速度快、作业安全性高、获取信息全面、数据相对精度高等特点。gCollector产品如图4所示。

图3. gSpin配套后处理软件Shuttle 图4. gCollector真值车